Принцип работы металлоискателя
Содержание
Металлоискателями или металлодетекторами (от англ. Metal Detector) принято называть электронные устройства для обнаружения металлических предметов, находящихся в воде, почве, стенах зданий и других средах. На рис. ниже показан момент работы с металлоискателем под водой.

Работа с металлоискателем под водой
В качестве поискового оборудования различные модификации металлоискателей (далее по тексту – МИ) задействованы во многих сферах человеческой деятельности, например:
- для поиска в земле металлолома, монет и ювелирных украшений, корректировки мест пролегания в почве скрытой кабельной проводки или инженерных коммуникаций привлекаются грунтовые МИ, эффективно работающие на глубине до 1 метра, либо глубинные детекторы с глубиной обнаружения более 3 метров;
- для обнаружения взрывных устройств применяются армейские МИ, называемые миноискателями;
- ручной досмотровый МИ взят на вооружение службами безопасности для выявления спрятанных на теле человека или в его багаже металлических предметов.
Базовый принцип работы МИ
Функционирование металлодетекторов основывается на практической реализации явления возникновения вихревых токов при изменении электромагнитного поля в процессе его распространения в физически неоднородной среде. По своей сути, МИ является электронным прибором, при включении которого создается направленный первичный сигнал, распространяющий в окружающей среде свое электромагнитное поле.
Принцип действия металлоискателя состоит в том, что при прохождении через предметы, обладающие токопроводящими свойствами (куски металла, минералы, элементы инженерных коммуникаций и т.п.), магнитное поле передаваемого (первичного) сигнала возбуждает на их поверхностях вихревые токи, создающие собственные поля. В результате искажаются конфигурация и параметры поля первичного сигнала, что фиксирует и обрабатывает принимающая аппаратура МИ. Параметры отраженного сигнала информируют о присутствии металлического предмета в зоне действия металлодетектора и его особенностях. В зависимости от уровня сложности схемотехники различных моделей МИ удается определять глубину залегания обнаруженного металлического предмета и его вид (золото, ферромагнитный сплав, цветной или черный металл).
На рис. ниже показана условная схема генерации магнитного поля вторичного сигнала, наглядно поясняющая, как работает металлоискатель.

Схема генерации электромагнитного поля в процессе работы МИ
Вышеизложенный принцип работы металлоискателя, требующий облучения радиоволнами исследуемой среды/объекта и расшифровку принятых отраженных сигналов, является базовым для всех современных серийных МИ. Компактный ручной металлодетектор сотрудника безопасности крупного торгового центра и арочный металлоискатель в международном аэропорту, высота рамки которого превышает 2 метра, работают по одинаковому принципу.
Частотный диапазон МИ
Диапазон рабочих частот современных металлодетекторов составляет от 1 кГц до 30 МГц.
Разбивка частотных параметров серийных МИ на основные диапазоны работы поисковых катушек с указанием принятых обозначений в зарубежной и российской классификации
| Диапазон рабочих частот | Англ. обозначение | Русск. обозначение |
|---|---|---|
| От 3 кГц до30 кГц | VLF - Very Low Frequency | СНЧ – сверхнизкие частоты |
| От 30 кГц до 300 кГц | LF - Low Frequency | НЧ – низкие частоты |
| От 300 кГц до 3 МГц | MF - Medium Frequency | СЧ – средние частоты |
| От 3 МГц до 30 МГц | HF - High Frequency | ВЧ – высокие частоты |
В практике поисковых работ с использованием МИ рабочие частоты первичного сигнала подбирают следующим образом:
- Низкочастотные радиоволны более чувствительны, по сравнению с ВЧ-излучением к мишеням из металлов, обладающих высокой электрической проводимостью (золото, серебро, медь и их сплавы). НЧ-сигналы глубоко проникают в землю, поэтому глубинные МИ, способные выявлять металлические предметы на глубине до 4 метров, работают на частотах в пределах 2,5-6,6 кГц. При этом чувствительность прибора к мелким мишеням снижается.
- Высокочастотные радиоволны имеют повышенную чувствительность к металлическим целям с низкой электропроводностью, изготовленным из алюминия, никеля и т.п., однако проникающая способность ВЧ-излучения в почву довольно низкая. Зато высокие частоты способны обнаруживать мелкие мишени размерами до 1 мм.
- Излучение среднечастотного интервала представляет собой своеобразный компромисс между vlf (СВЧ) и hf (ВЧ) сигналами и считается подходящим для поиска находок любого типа.
Базовая комплектация МИ
Практически все модификации серийных и самодельных металлодетекторов состоят из функционально однотипных элементов. На рис. ниже приведена конструкция типового МИ с указанием основных деталей и модульных блоков.
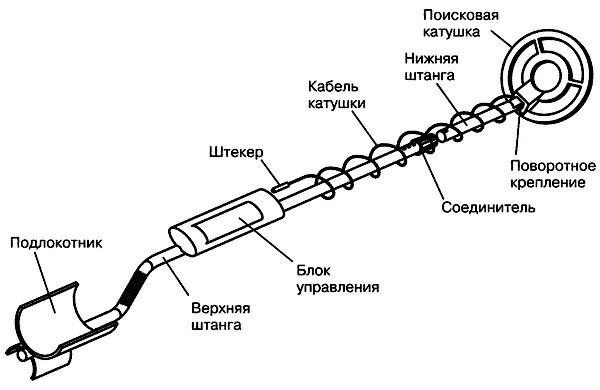
Конструкция типового МИ
В состав МИ входят следующие элементы:
- Поисковая катушка, выполняющая функции радиопередатчика и приемника отраженных сигналов. Конструктивно катушка поисковая представляет собой пластиковый корпус (в большинстве моделей МИ – круглой или эллиптической конфигурации), внутри которого размещены витки многожильного провода. В целях герметизации после укладки проводов внутренняя полость корпуса заливается компаундом.
- Нижняя штанга, предназначенная для:
- регулировки угла наклона катушки поисковой в целях обеспечения более точного исследования местности;
- жесткой фиксации катушки после корректировки ее пространственного положения.
- Средняя штанга, используемая для соединения верхней и нижней штанги. Средней штанге приданы функции регулировки длины МИ при подгонке под рост оператора.
- Верхняя штанга, на которой размещается блок управления. Наиболее удобными для пользования считаются изделия с S-образной верхней штангой, дополнительно оснащенные:
- подлокотником, используемым для упора локтя оператора;
- рукояткой, обеспечивающей удобный захват и удержание МИ в процессе поисковых работ.
- Блок управления, обрабатывающий информацию, получаемую от поисковой катушки, и выдающий оператору-пользователю результаты обработки в виде звуковых сигналов и цифровых данных на дисплее. Используется для:
- визуального и акустического контроля поискового процесса;
- управления работой аппаратуры МИ;
- настройки рабочих режимов аппаратуры.
На рис. ниже показаны блок управления отдельно и металлоискатель в комплекте с этим блоком.

Металлоискатель и блок управления
Модификации МИ
Конструкции современных металлоискателей зависят от методик построения схемотехники поискового аппарата. В соответствии с применяемым методом построения схемы выделяют следующие модификации металлодетекторов:
- Импульсные МИ, называемые также PI-металлоискателями (от англ. pulse induction – импульсная индукция). Принцип работы импульсного устройства заключается в подаче на катушку поисковой головки импульсных сигналов, которые создают электромагнитное поле, пульсирующее с определенной частотой. Включенное поле наводит вихревые токи на поверхности обнаруженного объекта. Сразу после выключения индуцирующего поля эти токи затухают, но не мгновенно, а в течение короткого временного промежутка, создавая затухающий сигнал, который улавливается катушкой. Анализ параметров затухающего магнитного «эха» позволяет судить о наличии или отсутствии металлических предметов.
- Балансные МИ, по зарубежной классификации – TR-металлоискатели (от transmitter-reciver – передатчик-приемник), работающие по методу индукционного баланса. Головка прибора оснащена двумя катушками, тщательно сбалансированными до нулевого значения взаимной индукции. Анализируемыми параметрами являются:
- амплитуда принятого сигнала;
- сдвиг фазы между отправленным и полученным сигналами.
- VLF/TR – металлоискатели, схема которых работает на низких рабочих частотах.
- RF-металлоискатели (от radio frequency – радиочастота), работающие в высокочастотном волновом диапазоне с перпендикулярно расположенными относительно друг друга передающей и приемной катушками.
- BFO-металлоискатели, называемые также генераторными металлодетекторами. Схема прибора строится по методу биений. В процессе работы измеряется частота LC-генератора, включающего поисковую катушку. Показания сравниваются с эталонными частотными параметрами, после чего полученную разностную частоту биений выводят на акустическую индикацию (динамик).
На рис. ниже показан грунтовый МИ с VLF-схемой, использующей катушку типа DD (DoubleD).

VLF-металлоискатель
Достоинства и недостатки металлоискателей
Любая модификация МИ имеет свои достоинства и недостатки, характерные для примененной методики построения схемы аппаратуры. Типовые достоинства и недостатки вышерассмотренных методов:
- PI-металлоискатели эффективны для выявления металлов в засоленных грунтах и морской воде, однако плохо распознают цели и весьма энергозатратны;
- TR-металлоискатели обладают высокой чувствительностью и хорошо различают разные типы металлов, однако при нарастании глубины чувствительность на мелкие мишени утрачивается;
- VLF/TR – металлоискатели способны отличать цветные металлы от черных, у них высокая разрешающая способность, однако достаточно сложная схемотехника затрудняет настройку прибора до нужного качества работы;
- RF-металлоискатели достаточно универсальны при их использовании в качестве глубинных МИ. Они не «отвлекаются» на мелкий металлический мусор, могут обнаруживать трубы и даже рудные жилы на глубине 5-6 метров. Недостаток – отсутствие чувствительности к мелким целям на малой глубине;
- BFO-металлоискатели отличаются сравнительно простой конструкцией, для поисковой катушки не требуется прецизионного исполнения. Из минусов применения – низкая чувствительность, нестабильная работа на минерализованных грунтах и во влажной почве.
Что находят любители металлопоиска
Земляной грунт выступает своеобразным консервантом, в котором старые вещи сохраняются достаточно долго. Поисковое занятие позволяет не только отдохнуть душой на природе, но и подзаработать на реализации найденного в толще земли или под водой металла. При помощи МИ поисковикам удается находить клады, ценные вещи и военные бронзовые артефакты, золотые ювелирные украшения и цветной металлолом, монеты времен Древней Руси и старинные нательные крестики XVI-XVIII вв. Известны случаи обнаружения золотых самородков и железных метеоритов. Использование МИ в любительских изысканиях предполагает определенные ограничения, не допускающие целенаправленных поисков на территориях памятников археологического наследия либо повреждений культурного слоя.
На рис. ниже показана монетка, обнаруженная при помощи МИ.

Находка любителя металлопоиска
Простой металлоискатель своими руками
Сборку простого МИ можно выполнить собственноручно, воспользовавшись доступными радиодеталями выпуска советских времен. На рис. ниже показана структура схемы МИ генераторного типа, построенной по методике биений (BFO-металлоискатель).
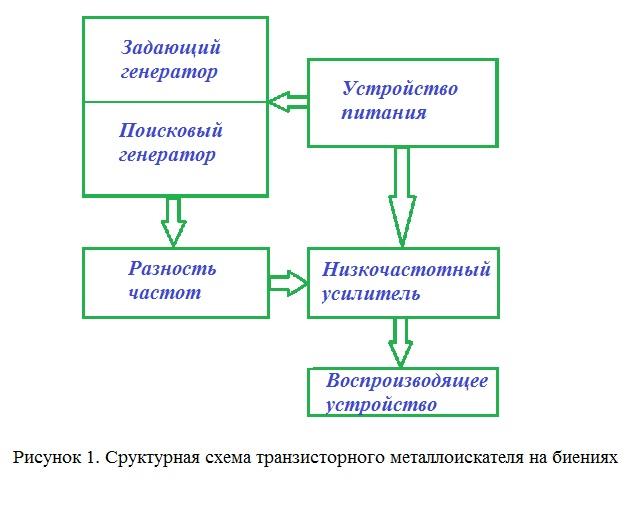
Структура схемы простого МИ на транзисторах
Схема строится из пяти основных модулей:
- задающего генератора, создающего эталонную частоту;
- поискового генератора, частота которого изменяется при обнаружении металлической мишени;
- низкочастотного усилителя, увеличивающего разность сигнала генераторов;
- звуковоспроизводящего устройства (динамика);
- источника питания.
На страницах Интернета можно найти десятки схем полноценных металлодетекторов, для сборки которых пригодятся резисторы, конденсаторы и транзисторы, которые производились еще в советские времена.
Эксперты уверяют, что на руках у населения России имеется не менее двух миллионов МИ, позволяющих вести активный металлопоиск. Наряду с самоделками, имеющими ограниченную сферу деятельности, поисковиками, используются изделия ведущих мировых брендов. На рис. ниже показан металлоискатель модели Garrett AT MAX, считающийся одним из лидеров продаж 2018 года в своем классе. Изделие относится к категории подводных и грунтовых МИ, работает на частоте 13,6 кГц и способно распознавать даже под водой на глубине 3 метров мелкие монеты разного диаметра.

Металлоискатель Garrett AT MAX